
Visuo-haptic VR (virtual reality) Laboratory
Aims
In the visuo-haptic VR lab, we aim to study the role of visual and proprioceptive information during the planning and control of goal-directed movements.
Setup
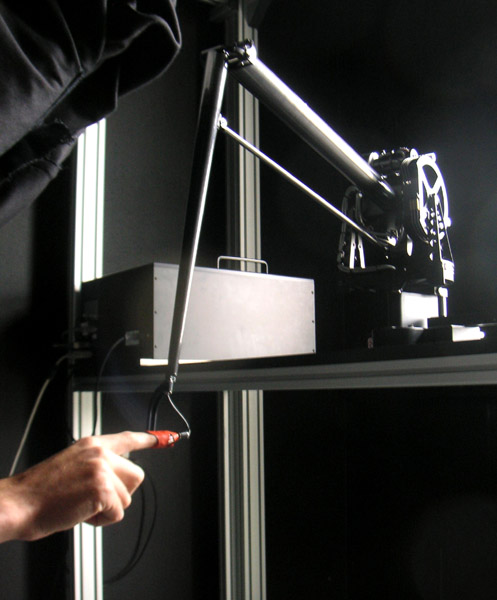
Experiments are performed within a visuo-haptic environment containing simulated three-dimensional visual and haptic presentations of objects. The haptic scene is created using a PHANToM™ 3.0 force feedback device (see picture) that is also used for tracking the finger’s position. The three-dimensional “visual scene” is created using stereo glasses combined with a computer screen. Observers look at the screen through a mirror, so that the visual scene is spatially aligned with the haptic scene. This set-up allows to separate manipulations of visual and proprioceptive feedback.
Picture
: Left:
PHANToM™
3.0 force feedback device
Detection and compensation of force perturbations
In our experiments, the movement trajectory is physically perturbed by a force perpendicular to the movement. Our results demonstrate that observers are well able to detect and categorize such trajectory perturbations using tactile-kinesthetic information in isolation: The force of detected perturbations is just slightly larger (~ .10 Newton) than detection thresholds for force measured in a single-task context (~.05 Newton). Observers’ categorizations of perturbation direction demonstrate that direction perception, in the majority of cases, is veridical and, for forces >1 Newton, sufficiently accurate to distinguish reliably between major directions. Moreover, perturbations altered movement trajectories considerably, but the distribution of movement endpoints at the visual target remained mostly unaffected for perturbations of small and medium amplitude or duration. These results are a first hint that we can efficiently detect perturbations without extra costs for the movement goal.
Poster:
Knut Drewing. Trajectory perturbations during visually guided pointing: Tactile-kinesthetic detection, categorization and movement costs. (PDF)