2017 - now: Postdoctoral Researcher Justus-Liebig University Giessen
2015 - Summer School in Computational Sensory-Motor Neuroscience
2014 - 2017: PhD (Dr. rer. nat.) Justus-Liebig University Giessen
2011 - 2014: Applied research in Usability and Human-Computer-Interaction at eResult GmbH (consultancy), Göttingen
Academic Degrees
2017: PhD (Dr. rer. nat.) General Psychology at Justus-Liebig University Giessen
Thesis: Beyond a single touch: Sequential and top-down effects in haptic perception
2010: M.Sc. Cognitive Science at University of Osnabrück
Thesis: An adaptive model of human attention based on hierarchical feature complexity
2008: B.Sc. Biology at Leibniz University Hannover
Publications
Memory influences haptic perception of softness. Metzger, A. & Drewing, K. (2019). Scientific Reports.
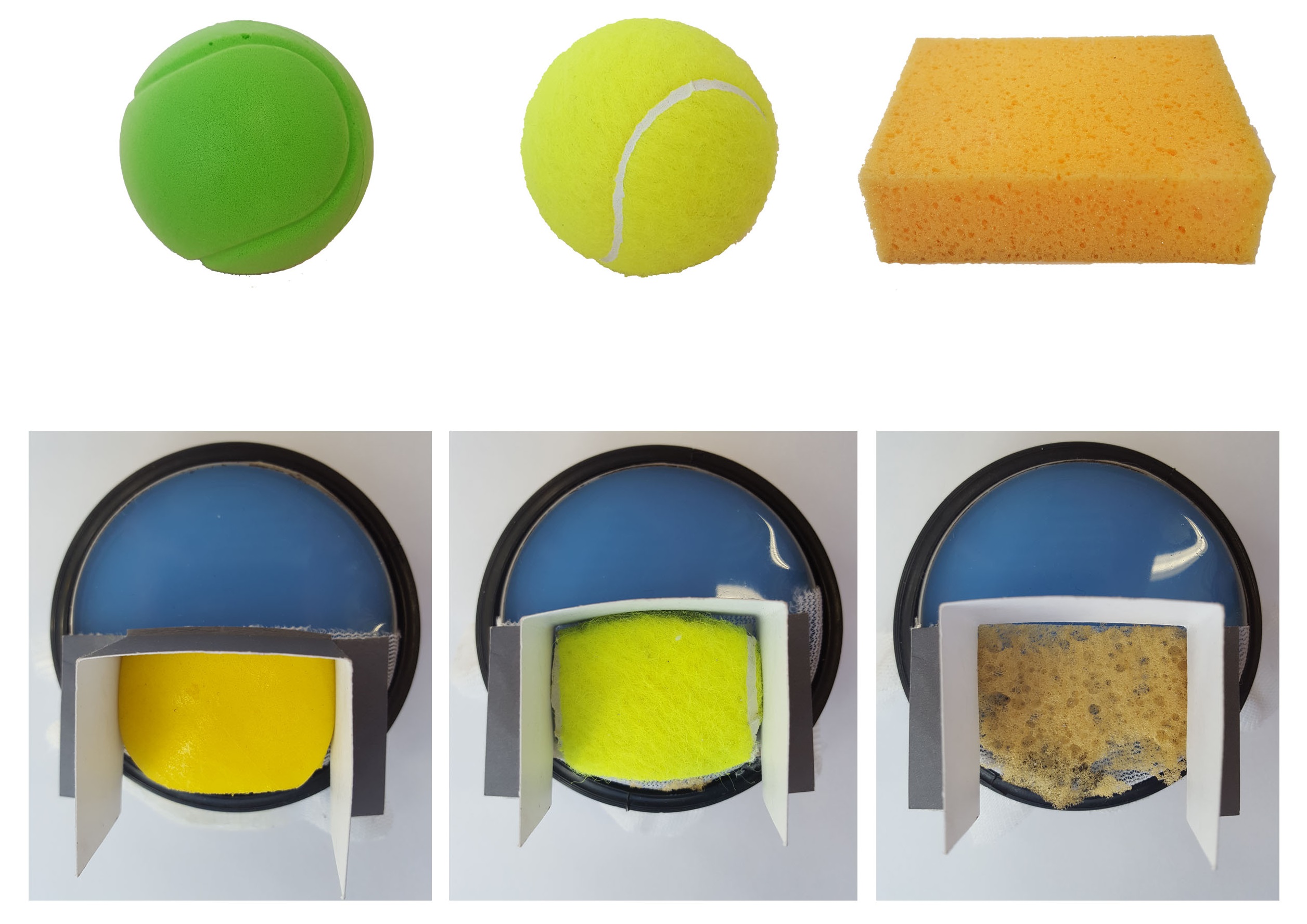
The memory of an object’s property (e.g. its typical colour) can affect its visual perception. We investigated whether memory of the softness of every-day objects influences their haptic perception. We produced bipartite silicone rubber stimuli: one half of the stimuli was covered with a layer of an object (sponge, wood, tennis ball, foam ball); the other half was uncovered silicone. Participants were not aware of the partition. They first used their bare finger to stroke laterally over the covering layer to recognize the well-known object and then indented the other half of the stimulus with a probe to compare its softness to that of an uncovered silicone stimulus. Across four experiments with different methods we showed that silicon stimuli covered with a layer of rather hard objects (tennis ball and wood) were perceived harder than the same silicon stimuli when being covered with a layer of rather soft objects (sponge and foam ball), indicating that haptic perception of softness is affected by memory.
Neural correlates of top-down modulation of haptic shapeversus roughness perception. Mueller, S., de Haas, B., Metzger, A., Drewing, K. & Fiehler, K. (2019). Human Brain Mapping.
Exploring an object's shape by touch also renders information about its surface rough-ness. It has been suggested that shape and roughness are processed distinctly in thebrain, a result based on comparing brain activation when exploring objects that differedin one of these features. To investigate the neural mechanisms of top-down control onhaptic perception of shape and roughness, we presented the same multidimensionalobjects but varied the relevance of each feature. Specifically, participants explored twoobjects that varied in shape (oblongness of cuboids) and surface roughness. They eitherhad to compare the shape or the roughness in an alternative-forced-choice-task. More-over, we examined whether the activation strength of the identified brain regions asmeasured by functional magnetic resonanceimaging (fMRI) can predict the behavioralperformance in the haptic discrimination task. We observed a widespread network ofactivation for shape and roughness perceptioncomprising bilateral precentral and post-central gyrus, cerebellum, and insula. Task-relevance of the object's shape increased acti-vation in the right supramarginal gyrus (SMG/BA 40) and the right precentral gyrus(PreCG/BA 44) suggesting that activation in these areas does not merely reflectstimulus-driven processes, such as exploring shape, but also entails top-down controlledprocesses driven by task-relevance. Moreover, the strength of the SMG/PreCG activa-tion predicted individual performance in the shape but not in the roughness discrimina-tion task. No activation was found for the reversed contrast (roughness > shape). Weconclude that macrogeometric properties, such as shape, can be modulated by top-downmechanisms whereas roughness, a microgeometric feature, seems to be processedautomatically.
Dynamics of exploration in haptic search. Metzger, A., Toscani, M., Valsecchi,M. & Drewing, K. (2019). World Haptics Conference (WHC), 2019 IEEE.
Haptic search is a common every day task. Here we characterize the movement dynamics in haptic search. Participants searched for a particular configuration of symbols on a tactile display. We compared the exploratory behavior of the fingers in proximity to potential targets: when any of the fingers encountered a potential target, there was higher probability that subsequent exploration was performed by the index or the middle finger. At the same time, the middle and the index fingers dramatically slowed down. Being in contact with the potential target, the index and the middle finger moved in around a smaller area than the other fingers, which rather seemed to move away to leave them space. Our results corroborate a previous hypothesis Morash (2016) that haptic search consists of two phases: a process of target search using all fingers, and a target analysis using the middle and the index finger, which might be specialized for fine analysis.
Effects of Stimulus Exploration Length and Time on the Integration of Information in Haptic Softness Discrimination. Metzger, A. & Drewing, K. (2019). IEEE Transactions on Haptics.
In haptic perception information is often sampled serially (e.g. a stimulus is repeatedly indented to estimate its softness), requiring that sensory information is retained and integrated over time. Hence, integration of sequential information is likely affected by memory. Particularly, when two sequentially explored stimuli are compared, integration of information on the second stimulus might be determined by the fading representation of the first stimulus. We investigated how the exploration length of the first stimulus and a temporal delay affect contributions of sequentially gathered estimates of the second stimulus in haptic softness discrimination. Participants subsequently explored two silicon rubber stimuli by indenting the first stimulus 1 or 5 times and the second stimulus always 3 times. In an additional experiment we introduced a 5s delay after the first stimulus was indented 5 times. We show that the longer the first stimulus is explored, the more estimates of the second stimulus’ softness contribute to the discrimination of the two stimuli, independent of the delay. This suggests that the exploration length of the first stimulus influences the strength of its representation, persisting at least for 5s, and determines how much information about the second stimulus is exploited for the comparison.
Top-down modulation of shape and roughness discrimination in active touch by covert attention. Metzger, A., Mueller, S., Fiehler, K. & Drewing, K. (2018). Attention, Perception, Psychophysics.
Due to limitations in perceptual processing, information relevant to momentary task goals is selected from the vast amount of available sensory information by top-down mechanisms which can increase perceptual performance. We investigated how covert attention affects perception of 3D objects in active touch. In our experiment, participants simultaneously explored the shape and roughness of two objects in sequence, and were told afterwards to discriminate one of the two features. To direct the focus of covert attention to the different features we manipulated the expectation of a shape or roughness judgment by varying the frequency of trials for each task (20%, 50%, 80%) and measured discrimination thresholds. We found higher discrimination thresholds for both shape and roughness perception when the task was unexpected, compared to the conditions in which the task was expected (or both tasks were expected equally). Our results suggest that active touch perception is modulated by expectations about the task. This implies that despite fundamental differences, active and passive touch are affected by feature selective covert attention in a similar way.
Haptic Saliency Model for Rigid Textured Surfaces. Metzger, A., Toscani, M., Valsecchi,M. & Drewing, K. (2018). Haptics: Science, Technology, and Applications. EuroHaptics 2018.
When touching an object, we focus more on some of its parts rather than touching the whole object’s surface, i.e. some parts are more salient than others. Here we investigated how different physical properties of rigid, plastic, relieved textures determine haptic exploratory behavior. We produced haptic stimuli whose textures were locally defined by random distributions of four independent features: amplitude, spatial frequency, orientation and isotropy. Participants explored two stimuli one after the other and in order to promote exploration we asked them to judge their similarity. We used a linear regression model to relate the features and their gradients to the exploratory behavior (spatial distribution of touch duration). The model predicts human behavior significantly better than chance, suggesting that exploratory movements are to some extent driven by the low level features we investigated. Remarkably, the contribution of each predictor changed as a function of the spatial scale in which it was defined, showing that haptic exploration preferences are spatially tuned, i.e. specific features are most salient at different spatial scales.
Integration of serial sensory information in haptic perception of softness. Metzger, A., Lezkan, A. & Drewing, K. (2018). Journal of Experimental Psychology: Human Perception and Performance.
Redundant estimates of an environmental property derived simultaneously from different
senses or cues are typically integrated according to the maximum likelihood estimation model (MLE):
Sensory estimates are weighted according to their reliabilities, maximizing the percept"s reliability.
Mechanisms underlying the integration of sequentially derived estimates from one sense are less clear.
Here we investigate the integration of serially sampled redundant information in softness perception.
We developed a method to manipulate haptically perceived softness of silicone rubber stimuli during bare-finger exploration.
We then manipulated softness estimates derived from single movement segments (indentations) in a multisegmented
exploration to assess their contributions to the overall percept. Participants explored two stimuli in sequence,
using 2 to 5 indentations, and reported which stimulus felt softer. Estimates of the first stimulus"s softness contributed to
the judgments similarly, whereas for the second stimulus estimates from later compared to earlier indentations contributed
less. In line with unequal weighting, the percept"s reliability increased with increasing exploration length less than was
predicted by the MLE model. This pattern of results is well explained by assuming that the representation of the first
stimulus fades when the second stimulus is explored, which fits with a neurophysiological model of perceptual decisions
(Deco, Rolls, & Romo, 2010).
Active Haptic Exploration of Softness: Indentation Force Is Systematically Related to Prediction, Sensation and Motivation. Lezkan, A., Metzger, A. & Drewing, K. (2018). Frontiers in integrative neuroscience.
Active finger movements play a crucial role in natural haptic perception. For the
perception of different haptic properties people use different well-chosen movement
schemes (Lederman and Klatzky, 1987). The haptic property of softness is stereotypically
judged by repeatedly pressing one’s finger against an objects’ surface, actively indenting
the object. It has been shown that people adjust the peak indentation forces of their
pressing movements to the expected stimulus’ softness in order to improve perception
(Kaim and Drewing, 2011). Here, we aim to clarify the mechanisms underlying such
adjustments. We disentangle how people modulate executed peak indentation forces
depending on predictive vs. sensory signals to softness, and investigate the influence
of the participants’ motivational state on movement adjustments. In Experiment 1,
participants performed a two alternative forced-choice (2AFC) softness discrimination
task for stimulus pairs from one of four softness categories. We manipulated the
predictability of the softness category. Either all stimuli of the same category were
presented in a blocked fashion, which allowed predicting the softness category of
the upcoming pair (predictive signals high), or stimuli from different categories were
randomly intermixed, which made prediction impossible (predictive signals low). Sensory
signals to softness category of the two stimuli in a pair are gathered during exploration.
We contrasted the first indentation (sensory signals low) and last indentation (sensory
signals high) in order to examine the effect of sensory signals. The results demonstrate
that participants systematically apply lower forces when softer objects (as compared
to harder objects) are indicated by predictive signals. Notably, sensory signals seemed
to be not as relevant as predictive signals. However, in Experiment 2, we manipulated
participant motivation by introducing rewards for good performance, and showed that
the use of sensory information for movement adjustments can be fostered by high
motivation. Overall, the present study demonstrates that exploratory movements are
adjusted to the actual perceptual situation and that in the process of fine-tuning,
closed- and open-loop mechanisms interact, with varying contributions depending on
the observer’s motivation.
The longer the first stimulus is explored in softness discrimination the longer it can be compared to the second one. Metzger, A., & Drewing, K. (2017). World Haptics Conference (WHC), 2017 IEEE.In haptic perception information is often sampled serially over a certain interval of time. For example, a stimulus is repeatedly indented to repeatedly estimate its softness. Albeit such redundant estimates are equally reliable, they seem to contribute differently to the overall haptic percept in a comparison task. When comparing the softness of two silicon rubber stimuli, the within-stimulus weights of estimates of the second stimulus' softness decrease during the exploration. Here we test the hypothesis that such decrease of weights depends on the representation strength of the first stimulus' softness. We varied the length of the first stimulus' exploration. Participants subsequently explored two silicon rubber stimuli by indenting the first stimulus (comparison) 1 or 5 times and the second stimulus (standard) always 3 times. We assessed the weights of indentation-specific estimates from the second stimulus by manipulating perceived softness during single indentations. Our results show that the longer the first stimulus is explored the more estimates of the second stimulus' softness can be included in the comparison of the two stimuli. This suggests that the exploration length of the first stimulus determines the strength of its representation which influences the decrease of weights of indentation-specific estimates of the second stimulus.
Haptic Aftereffect of Softness. Metzger, A., & Drewing, K. (2016). Haptics: Perception, Devices, Control, and Applications. EuroHaptics 2016.
Past sensory experience can influence present perception. We studied the effect of adaptation in haptic softness perception. Participants compared two silicon rubber stimuli, a reference and a comparison stimulus, by indenting them simultaneously with the index fingers of their two hands and decided which one felt softer. In adaptation conditions the index finger that explored the reference stimulus had previously been adapted to another rubber stimulus. The adaptation stimulus was indented 5 times with a force of >15 N, thus the two index fingers had a different sensory past. In baseline conditions there was no previous adaptation. We measured the Points of Subjective Equality (PSEs) of one reference stimulus to a set of comparison stimuli. We used four different adaptation stimuli, one was harder, two were softer and one had approximately the same compliance as compared to the reference stimulus. PSEs shifted as a function of the compliance of the adaptation stimulus: the reference was perceived to be softer when the finger had been adapted to a harder stimulus and it was perceived to be harder after adaptation to a softer stimulus. We conclude that recent sensory experience causes a shift of haptically perceived softness away from the softness of the adaptation stimulus. The finding that perceived softness is susceptible to adaptation suggests that there might be neural channels tuned to different softness values and softness is an independent primary perceptual quality.
Haptically perceived softness of deformable stimuli can be manipulated by applying external forces during the exploration. Metzger, A., & Drewing, K. (2015). World Haptics Conference (WHC), 2015 IEEE. The perception of softness is the result of the integration of information provided by multiple cutaneous and kinesthetic signals. The relative contributions of these signals to the combined percept of softness was not yet addressed directly. We transmitted subtle external vertical forces to the exploring human finger during the exploration of deformable silicone rubber stimuli to dissociate the force estimates provided by the kinesthetic signals and the efference copy from cutaneous force estimates. This manipulation introduced a conflict between the cutaneous and the kinesthetic/efference copy information on softness. We measured Points of Subjective Equality (PSE) of manipulated references to stimuli which were explored without external forces. PSEs shifted as a linear function of external force in predicted directions - to higher compliances with pushing and to lower compliances with pulling force. We found relative contribution of kinesthetic/efference copy information to perceived softness being 23% for rather hard and 29% for rather soft stimuli. Our results suggest that an integration of the kinesthetic/efference copy information and cutaneous information with constant weights underlies softness perception. The kinesthetic/efference copy information seems to be slightly more important for the perception of rather soft stimuli.
Invited Talks
Satellite Symposium on Haptic Science, 2019, Tokyo, Japan: "Integration of sensory information and exploratory movements in active touch."
Contributions in conferences
World Haptics Conference, 2015, Chicago, USA: Oral presentation. "Haptically perceived softness of deformable stimuli can be manipulated by applying external forces during the exploration."
European Conference on Visual Perception, 2016, Barcelona, Spain: Poster presentation. "Adaptation to softness in haptic perception."
World Haptics Conference, 2017, Fürstenfeldbruck (Munich), Germany: Oral presentation. "The longer the first stimulus is explored in softness discrimination the longer it can be compared to the second one."
Conference of Experimental Psychologists, 2017, Dresden, Germany: Oral presentation. "Serial integration of information in haptic softness perception."
Eurohaptics Conference, 2018, Pisa, Italy: Oral presentation. "Haptic Saliency Model for Rigid Textured Surfaces." Best paper award
World Haptics Conference, 2019, Tokyo, Japan: Oral presentation. "Dynamics of exploration in haptic search."
Professional Activities
Ad hoc Reviewer for: Attention, Perception & Psychophysics, IEEE Transactions on Haptics, IEEE Transactions on Applied Perception, World Haptics, Haptic Symposium, Eurohaptics
Guest Editor for: IEEE Transactions on Haptics
Teaching & Supervision
Course: Perception: Theory and Application (held in German: Wahrnehmung: Grundlagen und Anwedung) (SS16)
Bachelor thesis: J. Schmidt: Meomory softness. (WS17)
Master thesis: S. Bruckbauer: Top-down influences on sensory processing in somatosensory texture and shape perception. (SS16)

 The memory of an object’s property (e.g. its typical colour) can affect its visual perception. We investigated whether memory of the softness of every-day objects influences their haptic perception. We produced bipartite silicone rubber stimuli: one half of the stimuli was covered with a layer of an object (sponge, wood, tennis ball, foam ball); the other half was uncovered silicone. Participants were not aware of the partition. They first used their bare finger to stroke laterally over the covering layer to recognize the well-known object and then indented the other half of the stimulus with a probe to compare its softness to that of an uncovered silicone stimulus. Across four experiments with different methods we showed that silicon stimuli covered with a layer of rather hard objects (tennis ball and wood) were perceived harder than the same silicon stimuli when being covered with a layer of rather soft objects (sponge and foam ball), indicating that haptic perception of softness is affected by memory.
The memory of an object’s property (e.g. its typical colour) can affect its visual perception. We investigated whether memory of the softness of every-day objects influences their haptic perception. We produced bipartite silicone rubber stimuli: one half of the stimuli was covered with a layer of an object (sponge, wood, tennis ball, foam ball); the other half was uncovered silicone. Participants were not aware of the partition. They first used their bare finger to stroke laterally over the covering layer to recognize the well-known object and then indented the other half of the stimulus with a probe to compare its softness to that of an uncovered silicone stimulus. Across four experiments with different methods we showed that silicon stimuli covered with a layer of rather hard objects (tennis ball and wood) were perceived harder than the same silicon stimuli when being covered with a layer of rather soft objects (sponge and foam ball), indicating that haptic perception of softness is affected by memory.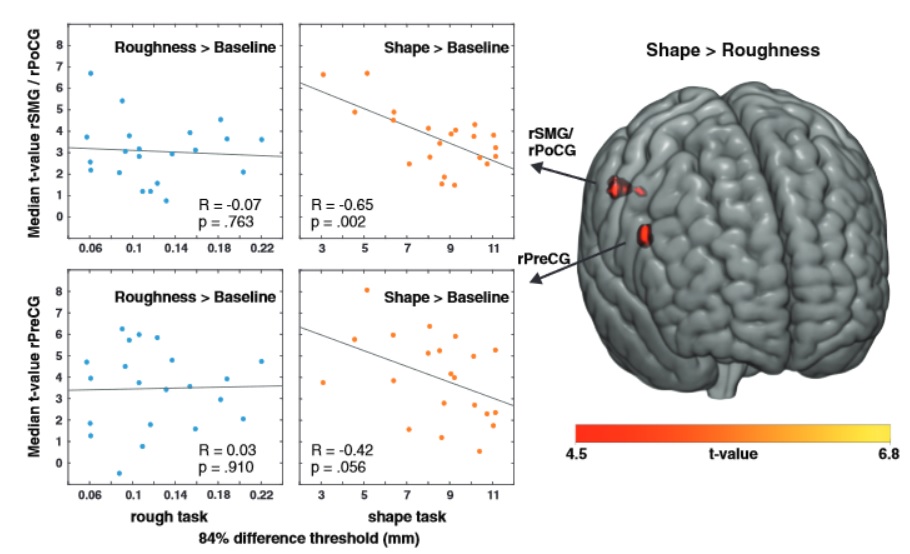 Exploring an object's shape by touch also renders information about its surface rough-ness. It has been suggested that shape and roughness are processed distinctly in thebrain, a result based on comparing brain activation when exploring objects that differedin one of these features. To investigate the neural mechanisms of top-down control onhaptic perception of shape and roughness, we presented the same multidimensionalobjects but varied the relevance of each feature. Specifically, participants explored twoobjects that varied in shape (oblongness of cuboids) and surface roughness. They eitherhad to compare the shape or the roughness in an alternative-forced-choice-task. More-over, we examined whether the activation strength of the identified brain regions asmeasured by functional magnetic resonanceimaging (fMRI) can predict the behavioralperformance in the haptic discrimination task. We observed a widespread network ofactivation for shape and roughness perceptioncomprising bilateral precentral and post-central gyrus, cerebellum, and insula. Task-relevance of the object's shape increased acti-vation in the right supramarginal gyrus (SMG/BA 40) and the right precentral gyrus(PreCG/BA 44) suggesting that activation in these areas does not merely reflectstimulus-driven processes, such as exploring shape, but also entails top-down controlledprocesses driven by task-relevance. Moreover, the strength of the SMG/PreCG activa-tion predicted individual performance in the shape but not in the roughness discrimina-tion task. No activation was found for the reversed contrast (roughness > shape). Weconclude that macrogeometric properties, such as shape, can be modulated by top-downmechanisms whereas roughness, a microgeometric feature, seems to be processedautomatically.
Exploring an object's shape by touch also renders information about its surface rough-ness. It has been suggested that shape and roughness are processed distinctly in thebrain, a result based on comparing brain activation when exploring objects that differedin one of these features. To investigate the neural mechanisms of top-down control onhaptic perception of shape and roughness, we presented the same multidimensionalobjects but varied the relevance of each feature. Specifically, participants explored twoobjects that varied in shape (oblongness of cuboids) and surface roughness. They eitherhad to compare the shape or the roughness in an alternative-forced-choice-task. More-over, we examined whether the activation strength of the identified brain regions asmeasured by functional magnetic resonanceimaging (fMRI) can predict the behavioralperformance in the haptic discrimination task. We observed a widespread network ofactivation for shape and roughness perceptioncomprising bilateral precentral and post-central gyrus, cerebellum, and insula. Task-relevance of the object's shape increased acti-vation in the right supramarginal gyrus (SMG/BA 40) and the right precentral gyrus(PreCG/BA 44) suggesting that activation in these areas does not merely reflectstimulus-driven processes, such as exploring shape, but also entails top-down controlledprocesses driven by task-relevance. Moreover, the strength of the SMG/PreCG activa-tion predicted individual performance in the shape but not in the roughness discrimina-tion task. No activation was found for the reversed contrast (roughness > shape). Weconclude that macrogeometric properties, such as shape, can be modulated by top-downmechanisms whereas roughness, a microgeometric feature, seems to be processedautomatically.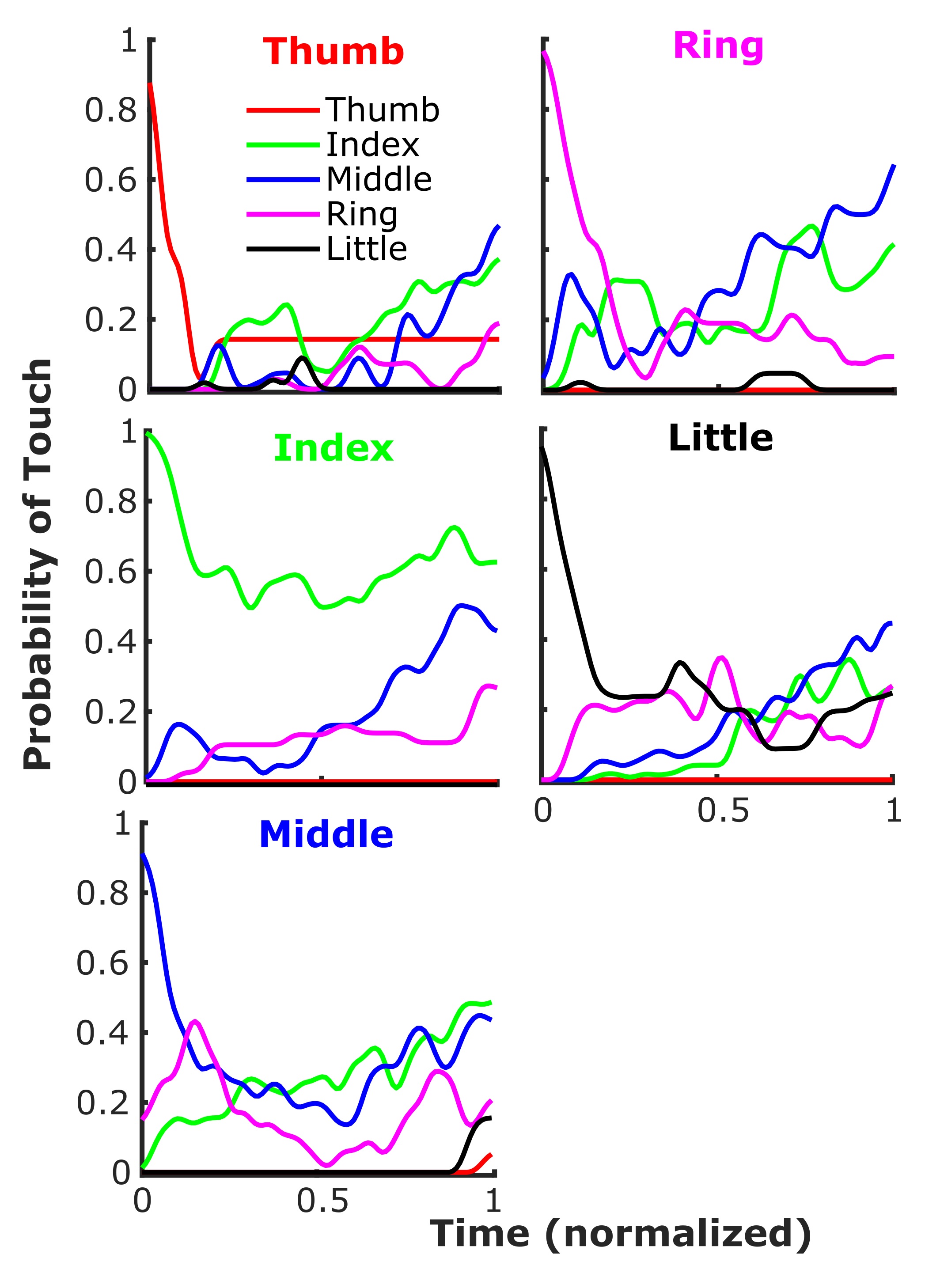 Haptic search is a common every day task. Here we characterize the movement dynamics in haptic search. Participants searched for a particular configuration of symbols on a tactile display. We compared the exploratory behavior of the fingers in proximity to potential targets: when any of the fingers encountered a potential target, there was higher probability that subsequent exploration was performed by the index or the middle finger. At the same time, the middle and the index fingers dramatically slowed down. Being in contact with the potential target, the index and the middle finger moved in around a smaller area than the other fingers, which rather seemed to move away to leave them space. Our results corroborate a previous hypothesis Morash (2016) that haptic search consists of two phases: a process of target search using all fingers, and a target analysis using the middle and the index finger, which might be specialized for fine analysis.
Haptic search is a common every day task. Here we characterize the movement dynamics in haptic search. Participants searched for a particular configuration of symbols on a tactile display. We compared the exploratory behavior of the fingers in proximity to potential targets: when any of the fingers encountered a potential target, there was higher probability that subsequent exploration was performed by the index or the middle finger. At the same time, the middle and the index fingers dramatically slowed down. Being in contact with the potential target, the index and the middle finger moved in around a smaller area than the other fingers, which rather seemed to move away to leave them space. Our results corroborate a previous hypothesis Morash (2016) that haptic search consists of two phases: a process of target search using all fingers, and a target analysis using the middle and the index finger, which might be specialized for fine analysis.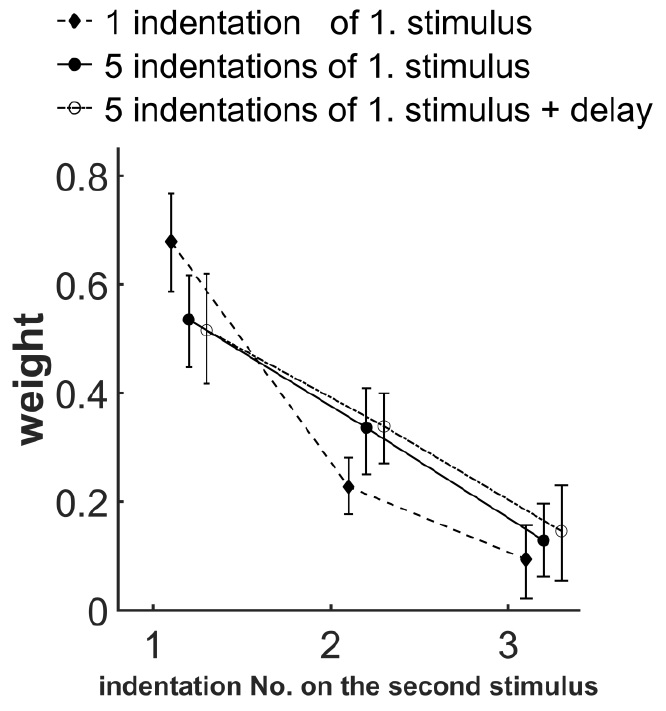 In haptic perception information is often sampled serially (e.g. a stimulus is repeatedly indented to estimate its softness), requiring that sensory information is retained and integrated over time. Hence, integration of sequential information is likely affected by memory. Particularly, when two sequentially explored stimuli are compared, integration of information on the second stimulus might be determined by the fading representation of the first stimulus. We investigated how the exploration length of the first stimulus and a temporal delay affect contributions of sequentially gathered estimates of the second stimulus in haptic softness discrimination. Participants subsequently explored two silicon rubber stimuli by indenting the first stimulus 1 or 5 times and the second stimulus always 3 times. In an additional experiment we introduced a 5s delay after the first stimulus was indented 5 times. We show that the longer the first stimulus is explored, the more estimates of the second stimulus’ softness contribute to the discrimination of the two stimuli, independent of the delay. This suggests that the exploration length of the first stimulus influences the strength of its representation, persisting at least for 5s, and determines how much information about the second stimulus is exploited for the comparison.
In haptic perception information is often sampled serially (e.g. a stimulus is repeatedly indented to estimate its softness), requiring that sensory information is retained and integrated over time. Hence, integration of sequential information is likely affected by memory. Particularly, when two sequentially explored stimuli are compared, integration of information on the second stimulus might be determined by the fading representation of the first stimulus. We investigated how the exploration length of the first stimulus and a temporal delay affect contributions of sequentially gathered estimates of the second stimulus in haptic softness discrimination. Participants subsequently explored two silicon rubber stimuli by indenting the first stimulus 1 or 5 times and the second stimulus always 3 times. In an additional experiment we introduced a 5s delay after the first stimulus was indented 5 times. We show that the longer the first stimulus is explored, the more estimates of the second stimulus’ softness contribute to the discrimination of the two stimuli, independent of the delay. This suggests that the exploration length of the first stimulus influences the strength of its representation, persisting at least for 5s, and determines how much information about the second stimulus is exploited for the comparison.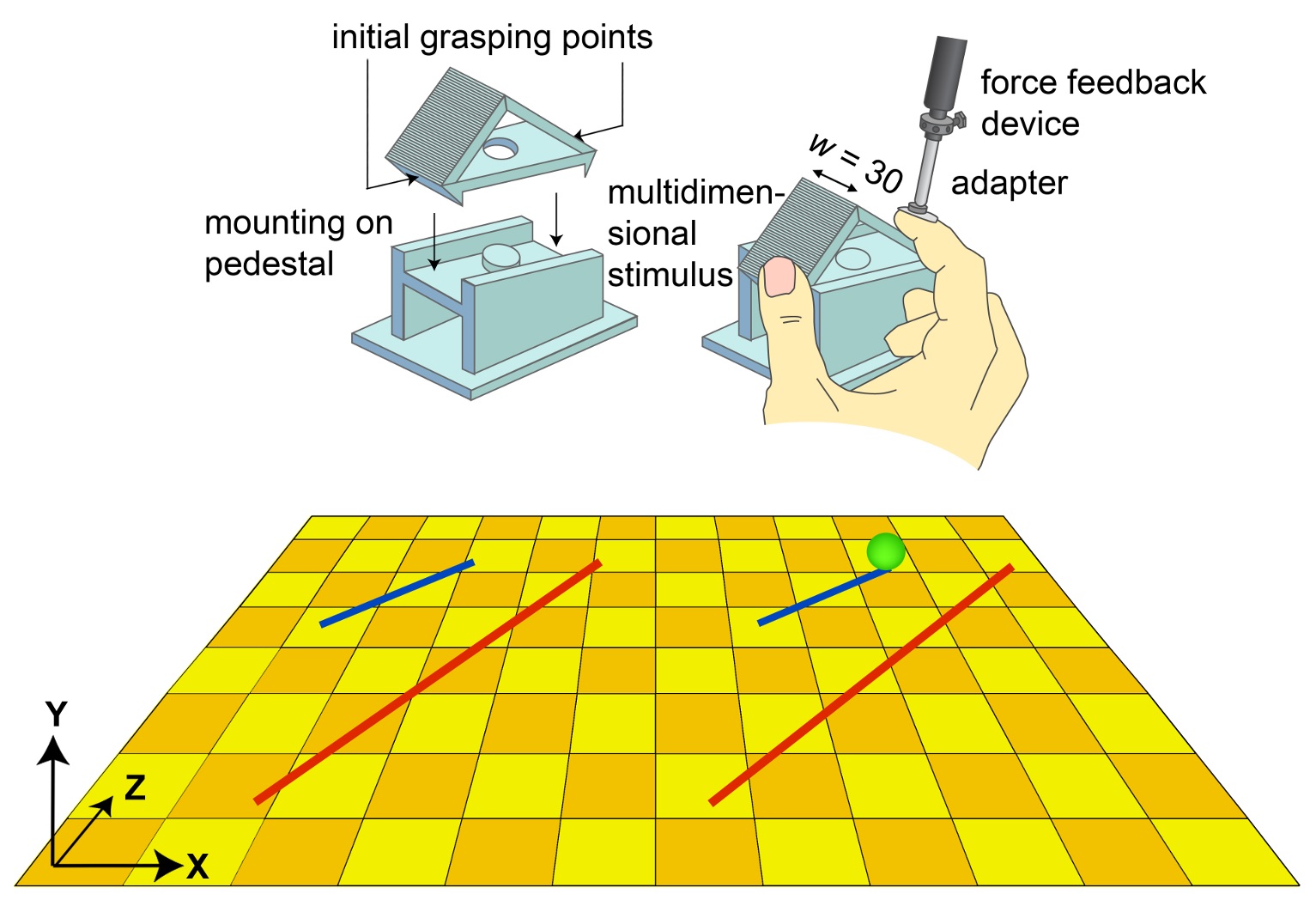 Due to limitations in perceptual processing, information relevant to momentary task goals is selected from the vast amount of available sensory information by top-down mechanisms which can increase perceptual performance. We investigated how covert attention affects perception of 3D objects in active touch. In our experiment, participants simultaneously explored the shape and roughness of two objects in sequence, and were told afterwards to discriminate one of the two features. To direct the focus of covert attention to the different features we manipulated the expectation of a shape or roughness judgment by varying the frequency of trials for each task (20%, 50%, 80%) and measured discrimination thresholds. We found higher discrimination thresholds for both shape and roughness perception when the task was unexpected, compared to the conditions in which the task was expected (or both tasks were expected equally). Our results suggest that active touch perception is modulated by expectations about the task. This implies that despite fundamental differences, active and passive touch are affected by feature selective covert attention in a similar way.
Due to limitations in perceptual processing, information relevant to momentary task goals is selected from the vast amount of available sensory information by top-down mechanisms which can increase perceptual performance. We investigated how covert attention affects perception of 3D objects in active touch. In our experiment, participants simultaneously explored the shape and roughness of two objects in sequence, and were told afterwards to discriminate one of the two features. To direct the focus of covert attention to the different features we manipulated the expectation of a shape or roughness judgment by varying the frequency of trials for each task (20%, 50%, 80%) and measured discrimination thresholds. We found higher discrimination thresholds for both shape and roughness perception when the task was unexpected, compared to the conditions in which the task was expected (or both tasks were expected equally). Our results suggest that active touch perception is modulated by expectations about the task. This implies that despite fundamental differences, active and passive touch are affected by feature selective covert attention in a similar way.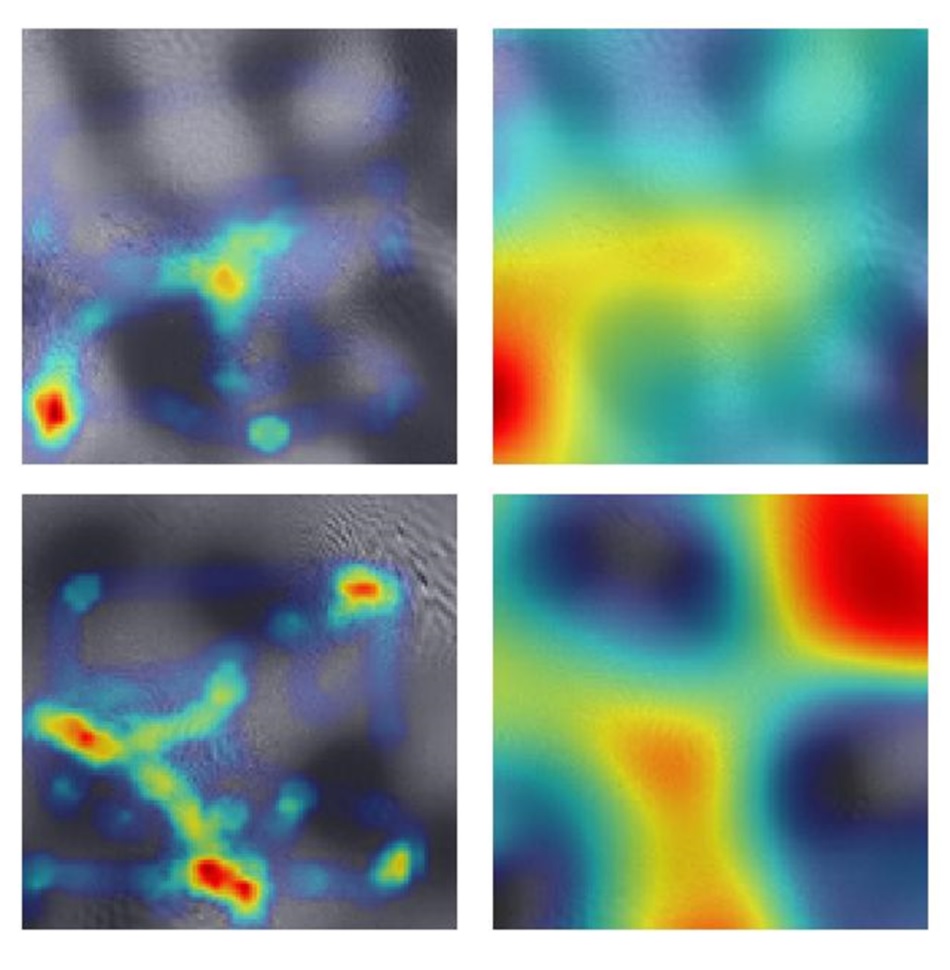 When touching an object, we focus more on some of its parts rather than touching the whole object’s surface, i.e. some parts are more salient than others. Here we investigated how different physical properties of rigid, plastic, relieved textures determine haptic exploratory behavior. We produced haptic stimuli whose textures were locally defined by random distributions of four independent features: amplitude, spatial frequency, orientation and isotropy. Participants explored two stimuli one after the other and in order to promote exploration we asked them to judge their similarity. We used a linear regression model to relate the features and their gradients to the exploratory behavior (spatial distribution of touch duration). The model predicts human behavior significantly better than chance, suggesting that exploratory movements are to some extent driven by the low level features we investigated. Remarkably, the contribution of each predictor changed as a function of the spatial scale in which it was defined, showing that haptic exploration preferences are spatially tuned, i.e. specific features are most salient at different spatial scales.
When touching an object, we focus more on some of its parts rather than touching the whole object’s surface, i.e. some parts are more salient than others. Here we investigated how different physical properties of rigid, plastic, relieved textures determine haptic exploratory behavior. We produced haptic stimuli whose textures were locally defined by random distributions of four independent features: amplitude, spatial frequency, orientation and isotropy. Participants explored two stimuli one after the other and in order to promote exploration we asked them to judge their similarity. We used a linear regression model to relate the features and their gradients to the exploratory behavior (spatial distribution of touch duration). The model predicts human behavior significantly better than chance, suggesting that exploratory movements are to some extent driven by the low level features we investigated. Remarkably, the contribution of each predictor changed as a function of the spatial scale in which it was defined, showing that haptic exploration preferences are spatially tuned, i.e. specific features are most salient at different spatial scales.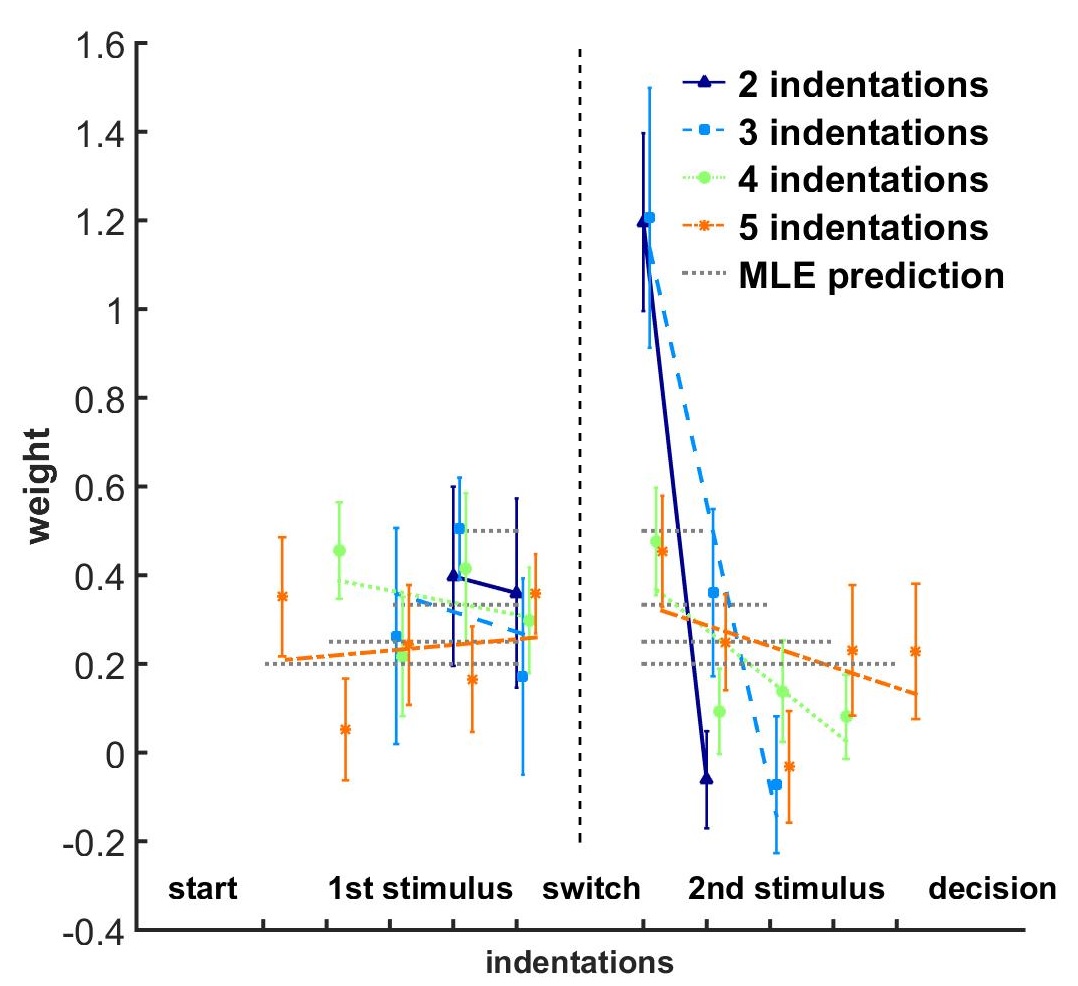 Redundant estimates of an environmental property derived simultaneously from different
senses or cues are typically integrated according to the maximum likelihood estimation model (MLE):
Sensory estimates are weighted according to their reliabilities, maximizing the percept"s reliability.
Mechanisms underlying the integration of sequentially derived estimates from one sense are less clear.
Here we investigate the integration of serially sampled redundant information in softness perception.
We developed a method to manipulate haptically perceived softness of silicone rubber stimuli during bare-finger exploration.
We then manipulated softness estimates derived from single movement segments (indentations) in a multisegmented
exploration to assess their contributions to the overall percept. Participants explored two stimuli in sequence,
using 2 to 5 indentations, and reported which stimulus felt softer. Estimates of the first stimulus"s softness contributed to
the judgments similarly, whereas for the second stimulus estimates from later compared to earlier indentations contributed
less. In line with unequal weighting, the percept"s reliability increased with increasing exploration length less than was
predicted by the MLE model. This pattern of results is well explained by assuming that the representation of the first
stimulus fades when the second stimulus is explored, which fits with a neurophysiological model of perceptual decisions
(Deco, Rolls, & Romo, 2010).
Redundant estimates of an environmental property derived simultaneously from different
senses or cues are typically integrated according to the maximum likelihood estimation model (MLE):
Sensory estimates are weighted according to their reliabilities, maximizing the percept"s reliability.
Mechanisms underlying the integration of sequentially derived estimates from one sense are less clear.
Here we investigate the integration of serially sampled redundant information in softness perception.
We developed a method to manipulate haptically perceived softness of silicone rubber stimuli during bare-finger exploration.
We then manipulated softness estimates derived from single movement segments (indentations) in a multisegmented
exploration to assess their contributions to the overall percept. Participants explored two stimuli in sequence,
using 2 to 5 indentations, and reported which stimulus felt softer. Estimates of the first stimulus"s softness contributed to
the judgments similarly, whereas for the second stimulus estimates from later compared to earlier indentations contributed
less. In line with unequal weighting, the percept"s reliability increased with increasing exploration length less than was
predicted by the MLE model. This pattern of results is well explained by assuming that the representation of the first
stimulus fades when the second stimulus is explored, which fits with a neurophysiological model of perceptual decisions
(Deco, Rolls, & Romo, 2010).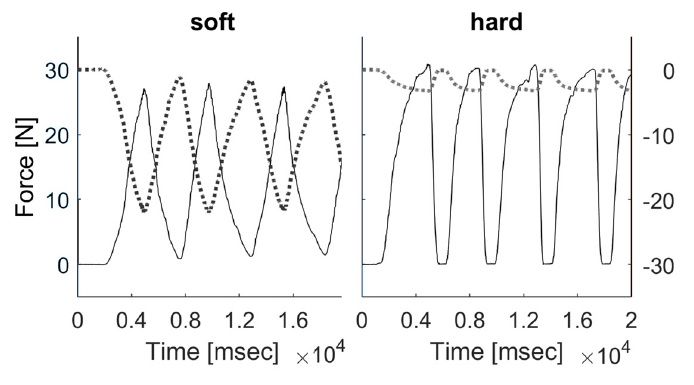 Active finger movements play a crucial role in natural haptic perception. For the
perception of different haptic properties people use different well-chosen movement
schemes (Lederman and Klatzky, 1987). The haptic property of softness is stereotypically
judged by repeatedly pressing one’s finger against an objects’ surface, actively indenting
the object. It has been shown that people adjust the peak indentation forces of their
pressing movements to the expected stimulus’ softness in order to improve perception
(Kaim and Drewing, 2011). Here, we aim to clarify the mechanisms underlying such
adjustments. We disentangle how people modulate executed peak indentation forces
depending on predictive vs. sensory signals to softness, and investigate the influence
of the participants’ motivational state on movement adjustments. In Experiment 1,
participants performed a two alternative forced-choice (2AFC) softness discrimination
task for stimulus pairs from one of four softness categories. We manipulated the
predictability of the softness category. Either all stimuli of the same category were
presented in a blocked fashion, which allowed predicting the softness category of
the upcoming pair (predictive signals high), or stimuli from different categories were
randomly intermixed, which made prediction impossible (predictive signals low). Sensory
signals to softness category of the two stimuli in a pair are gathered during exploration.
We contrasted the first indentation (sensory signals low) and last indentation (sensory
signals high) in order to examine the effect of sensory signals. The results demonstrate
that participants systematically apply lower forces when softer objects (as compared
to harder objects) are indicated by predictive signals. Notably, sensory signals seemed
to be not as relevant as predictive signals. However, in Experiment 2, we manipulated
participant motivation by introducing rewards for good performance, and showed that
the use of sensory information for movement adjustments can be fostered by high
motivation. Overall, the present study demonstrates that exploratory movements are
adjusted to the actual perceptual situation and that in the process of fine-tuning,
closed- and open-loop mechanisms interact, with varying contributions depending on
the observer’s motivation.
Active finger movements play a crucial role in natural haptic perception. For the
perception of different haptic properties people use different well-chosen movement
schemes (Lederman and Klatzky, 1987). The haptic property of softness is stereotypically
judged by repeatedly pressing one’s finger against an objects’ surface, actively indenting
the object. It has been shown that people adjust the peak indentation forces of their
pressing movements to the expected stimulus’ softness in order to improve perception
(Kaim and Drewing, 2011). Here, we aim to clarify the mechanisms underlying such
adjustments. We disentangle how people modulate executed peak indentation forces
depending on predictive vs. sensory signals to softness, and investigate the influence
of the participants’ motivational state on movement adjustments. In Experiment 1,
participants performed a two alternative forced-choice (2AFC) softness discrimination
task for stimulus pairs from one of four softness categories. We manipulated the
predictability of the softness category. Either all stimuli of the same category were
presented in a blocked fashion, which allowed predicting the softness category of
the upcoming pair (predictive signals high), or stimuli from different categories were
randomly intermixed, which made prediction impossible (predictive signals low). Sensory
signals to softness category of the two stimuli in a pair are gathered during exploration.
We contrasted the first indentation (sensory signals low) and last indentation (sensory
signals high) in order to examine the effect of sensory signals. The results demonstrate
that participants systematically apply lower forces when softer objects (as compared
to harder objects) are indicated by predictive signals. Notably, sensory signals seemed
to be not as relevant as predictive signals. However, in Experiment 2, we manipulated
participant motivation by introducing rewards for good performance, and showed that
the use of sensory information for movement adjustments can be fostered by high
motivation. Overall, the present study demonstrates that exploratory movements are
adjusted to the actual perceptual situation and that in the process of fine-tuning,
closed- and open-loop mechanisms interact, with varying contributions depending on
the observer’s motivation.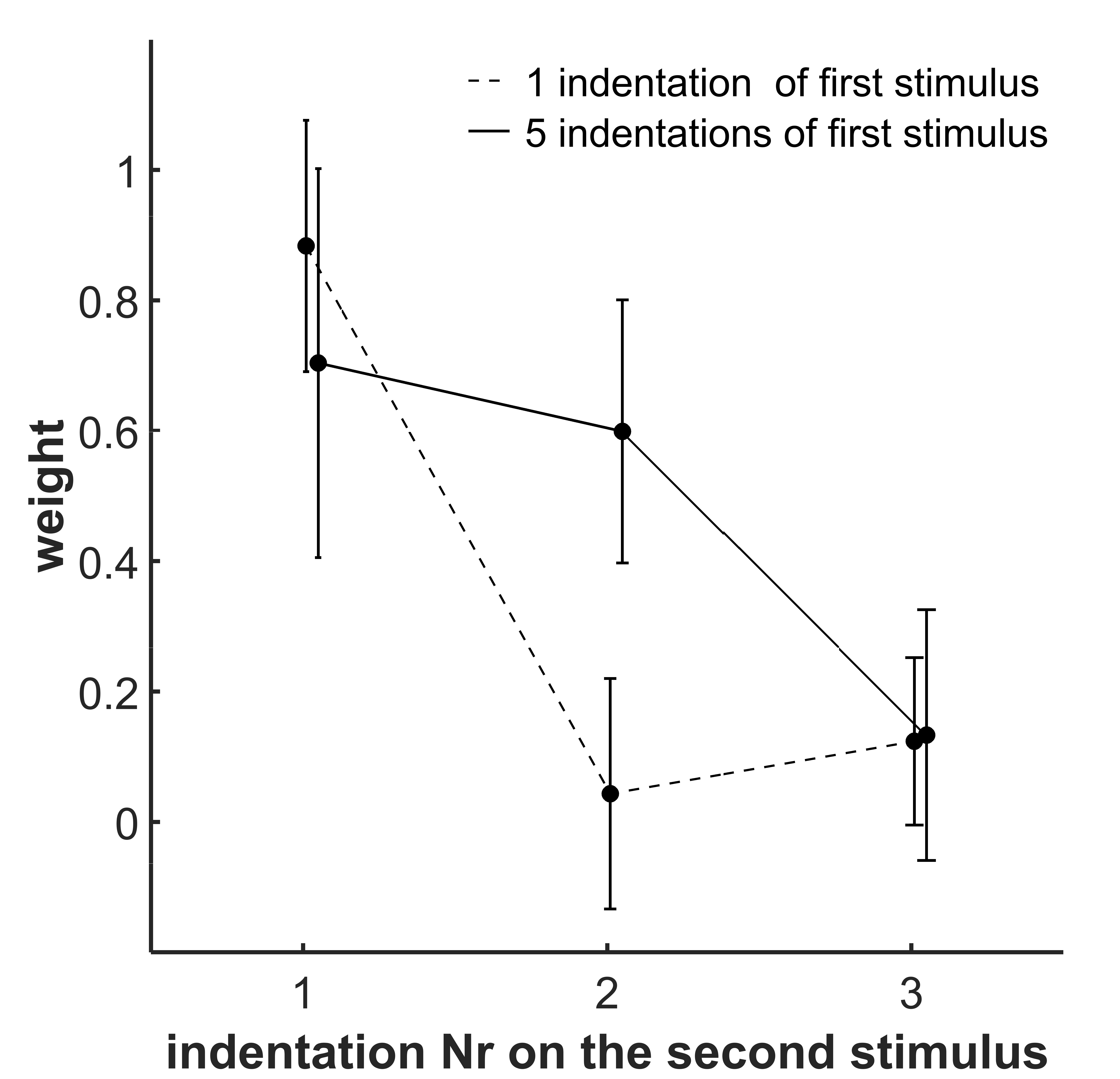 In haptic perception information is often sampled serially over a certain interval of time. For example, a stimulus is repeatedly indented to repeatedly estimate its softness. Albeit such redundant estimates are equally reliable, they seem to contribute differently to the overall haptic percept in a comparison task. When comparing the softness of two silicon rubber stimuli, the within-stimulus weights of estimates of the second stimulus' softness decrease during the exploration. Here we test the hypothesis that such decrease of weights depends on the representation strength of the first stimulus' softness. We varied the length of the first stimulus' exploration. Participants subsequently explored two silicon rubber stimuli by indenting the first stimulus (comparison) 1 or 5 times and the second stimulus (standard) always 3 times. We assessed the weights of indentation-specific estimates from the second stimulus by manipulating perceived softness during single indentations. Our results show that the longer the first stimulus is explored the more estimates of the second stimulus' softness can be included in the comparison of the two stimuli. This suggests that the exploration length of the first stimulus determines the strength of its representation which influences the decrease of weights of indentation-specific estimates of the second stimulus.
In haptic perception information is often sampled serially over a certain interval of time. For example, a stimulus is repeatedly indented to repeatedly estimate its softness. Albeit such redundant estimates are equally reliable, they seem to contribute differently to the overall haptic percept in a comparison task. When comparing the softness of two silicon rubber stimuli, the within-stimulus weights of estimates of the second stimulus' softness decrease during the exploration. Here we test the hypothesis that such decrease of weights depends on the representation strength of the first stimulus' softness. We varied the length of the first stimulus' exploration. Participants subsequently explored two silicon rubber stimuli by indenting the first stimulus (comparison) 1 or 5 times and the second stimulus (standard) always 3 times. We assessed the weights of indentation-specific estimates from the second stimulus by manipulating perceived softness during single indentations. Our results show that the longer the first stimulus is explored the more estimates of the second stimulus' softness can be included in the comparison of the two stimuli. This suggests that the exploration length of the first stimulus determines the strength of its representation which influences the decrease of weights of indentation-specific estimates of the second stimulus.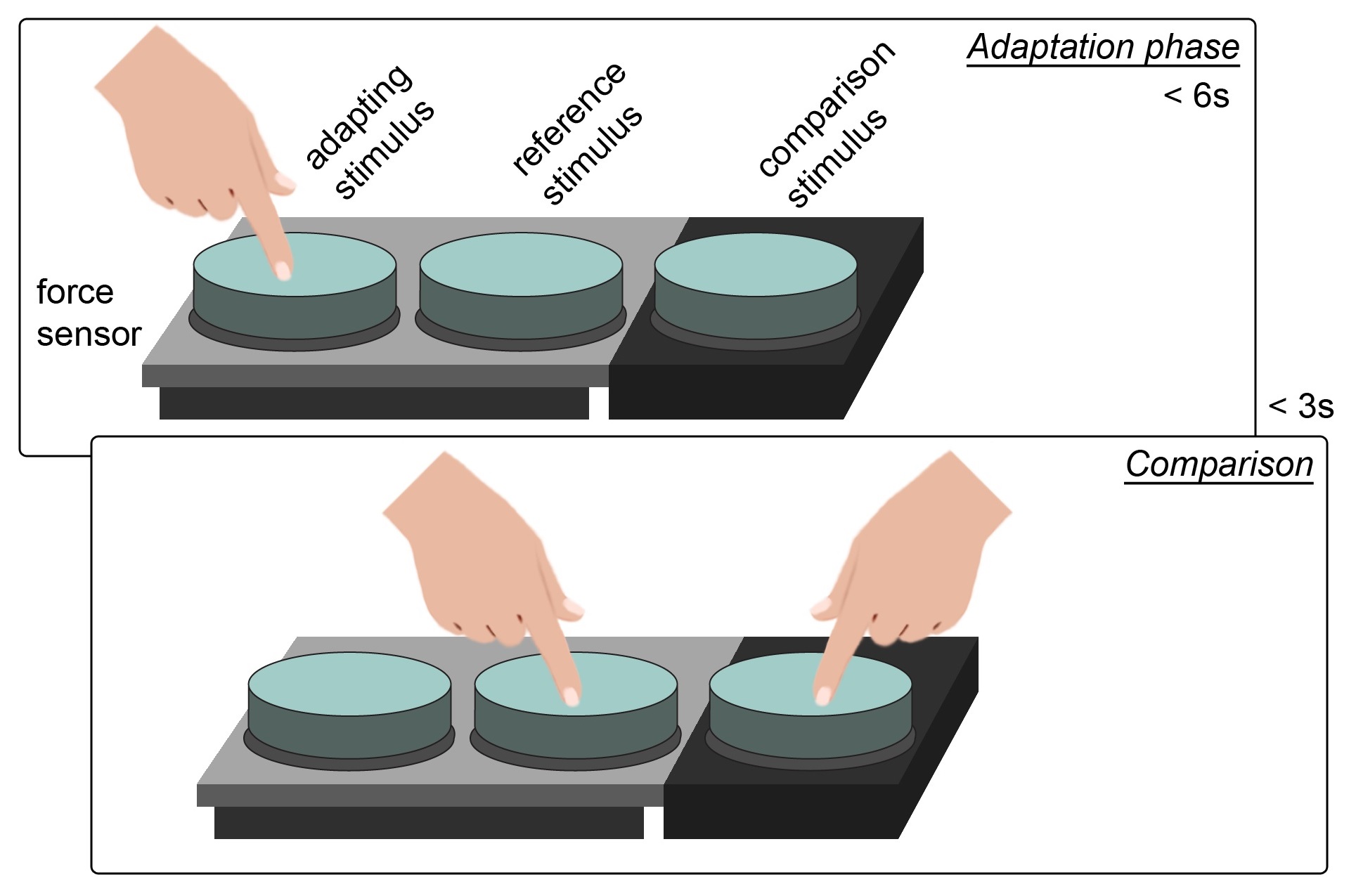 Past sensory experience can influence present perception. We studied the effect of adaptation in haptic softness perception. Participants compared two silicon rubber stimuli, a reference and a comparison stimulus, by indenting them simultaneously with the index fingers of their two hands and decided which one felt softer. In adaptation conditions the index finger that explored the reference stimulus had previously been adapted to another rubber stimulus. The adaptation stimulus was indented 5 times with a force of >15 N, thus the two index fingers had a different sensory past. In baseline conditions there was no previous adaptation. We measured the Points of Subjective Equality (PSEs) of one reference stimulus to a set of comparison stimuli. We used four different adaptation stimuli, one was harder, two were softer and one had approximately the same compliance as compared to the reference stimulus. PSEs shifted as a function of the compliance of the adaptation stimulus: the reference was perceived to be softer when the finger had been adapted to a harder stimulus and it was perceived to be harder after adaptation to a softer stimulus. We conclude that recent sensory experience causes a shift of haptically perceived softness away from the softness of the adaptation stimulus. The finding that perceived softness is susceptible to adaptation suggests that there might be neural channels tuned to different softness values and softness is an independent primary perceptual quality.
Past sensory experience can influence present perception. We studied the effect of adaptation in haptic softness perception. Participants compared two silicon rubber stimuli, a reference and a comparison stimulus, by indenting them simultaneously with the index fingers of their two hands and decided which one felt softer. In adaptation conditions the index finger that explored the reference stimulus had previously been adapted to another rubber stimulus. The adaptation stimulus was indented 5 times with a force of >15 N, thus the two index fingers had a different sensory past. In baseline conditions there was no previous adaptation. We measured the Points of Subjective Equality (PSEs) of one reference stimulus to a set of comparison stimuli. We used four different adaptation stimuli, one was harder, two were softer and one had approximately the same compliance as compared to the reference stimulus. PSEs shifted as a function of the compliance of the adaptation stimulus: the reference was perceived to be softer when the finger had been adapted to a harder stimulus and it was perceived to be harder after adaptation to a softer stimulus. We conclude that recent sensory experience causes a shift of haptically perceived softness away from the softness of the adaptation stimulus. The finding that perceived softness is susceptible to adaptation suggests that there might be neural channels tuned to different softness values and softness is an independent primary perceptual quality. The perception of softness is the result of the integration of information provided by multiple cutaneous and kinesthetic signals. The relative contributions of these signals to the combined percept of softness was not yet addressed directly. We transmitted subtle external vertical forces to the exploring human finger during the exploration of deformable silicone rubber stimuli to dissociate the force estimates provided by the kinesthetic signals and the efference copy from cutaneous force estimates. This manipulation introduced a conflict between the cutaneous and the kinesthetic/efference copy information on softness. We measured Points of Subjective Equality (PSE) of manipulated references to stimuli which were explored without external forces. PSEs shifted as a linear function of external force in predicted directions - to higher compliances with pushing and to lower compliances with pulling force. We found relative contribution of kinesthetic/efference copy information to perceived softness being 23% for rather hard and 29% for rather soft stimuli. Our results suggest that an integration of the kinesthetic/efference copy information and cutaneous information with constant weights underlies softness perception. The kinesthetic/efference copy information seems to be slightly more important for the perception of rather soft stimuli.
The perception of softness is the result of the integration of information provided by multiple cutaneous and kinesthetic signals. The relative contributions of these signals to the combined percept of softness was not yet addressed directly. We transmitted subtle external vertical forces to the exploring human finger during the exploration of deformable silicone rubber stimuli to dissociate the force estimates provided by the kinesthetic signals and the efference copy from cutaneous force estimates. This manipulation introduced a conflict between the cutaneous and the kinesthetic/efference copy information on softness. We measured Points of Subjective Equality (PSE) of manipulated references to stimuli which were explored without external forces. PSEs shifted as a linear function of external force in predicted directions - to higher compliances with pushing and to lower compliances with pulling force. We found relative contribution of kinesthetic/efference copy information to perceived softness being 23% for rather hard and 29% for rather soft stimuli. Our results suggest that an integration of the kinesthetic/efference copy information and cutaneous information with constant weights underlies softness perception. The kinesthetic/efference copy information seems to be slightly more important for the perception of rather soft stimuli.